二、项目方案:
1、小口径非球面磁流变抛光及其亚表面损伤研究 国家自然科学基金项目;
2、基于磨粒均布的弹性砂轮制备及其磁控抛光机理研究 湖南省自科基金项目;
3、小口径非球面磁流变抛光及其亚表面损伤研究 省教育厅项目.
四、预期成果:
自然光因其良好的显色性能和视觉效果,以及能够给人愉悦温暖的积极心理感受等特点,在人们的日常生活中扮演着举足轻重的角色。然而由于多种因素影响,人们并不能在一天之内都能获取良好的自然光照。据调查显示,因一天内日照的角度,房屋的结构,楼房的朝向等因素的影响,不同户型都存在不同程度的光照问题,特别是侧面和正面采光不足的问题。
|
户型编号
|
DFmin/%
|
DFmax/%
|
DFave/%
|
DFmin/DFave
|
|
A
|
0.28
|
3.93
|
1.24
|
0.226
|
|
B
|
0.41
|
4.29
|
1.41
|
0.291
|
|
C
|
0.21
|
3.35
|
0.92
|
0.228
|
|
D
|
0.33
|
3.75
|
1.03
|
0.320
|
|
E
|
0.22
|
3.51
|
1.01
|
0.218
|
表一:不同房屋采光情况调查数据表
Dfave为采光系统平均值,结果显示,所测量住宅起居室采光系数标准均不满足“侧面采光的采光系数应低于2%”要求。而现有的解决方案或是需要加装光纤导轨等额外装置,或是容易产生眩光、牺牲窗户的观察功能等问题。
在这一背景下,围绕窗户的玻璃窗板的反射和折射光线功能,对其展开设计,通过简单的机械结构来实现玻璃窗的伸缩和翻转,使其更大程度的发挥其反射和折射光线的功能,从而在不牺牲原有的观察功能之下,还能够解决室内的光照问题,且光照效果自然,不会产生眩光等问题。除此之外,加入电控系统和传感器,让窗户变得更加智能化,可以根据外界的环境时时地,自动地调整角度,真正地解放人的双手,让人们更加智能、更加便捷、更能方便地享受自然光照。
五、经费预算:
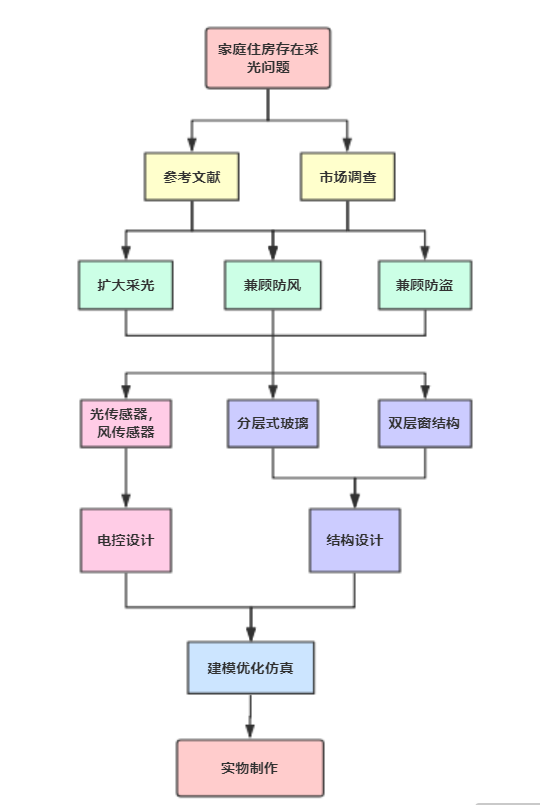
1.研究思路
1.1分层式玻璃的采用

图1.普通玻璃与分层式玻璃对光的折射反射图
如图1所示,普通玻璃对入射太阳光只起到一次的折射反射作用,反射太阳光全部浪费,且折射到室内只有一个方向上的光;分层式玻璃当平动不同距离时,可以对自然光进行多次折射反射,大大提高对反射光的利用率,分层式玻璃翻转不同角度时,以同一角度入射的自然光可被折射到多个角度,大大提高室内的采光面积。因此采用分层式的玻璃。
1.2双层窗户的设计

图2.内外窗搭配示意图
考虑到高层建筑防风的问题,采用了双层窗板的结构:在解决上述问题的同时,兼顾光源过强时进行遮光,声源过强时防噪,夜间防盗,保温等多重功能。
2.机构设计
2.1非标准齿轮

图3.非标准齿轮配合图
如图三所示非标准齿轮,采用在齿轮上表面开设凹槽且在凹槽两端加设限位装置的方式对下文所述曲柄起到限位和提供动力的功能,具体实施方式如下文。
2.2曲柄伸缩杆机构
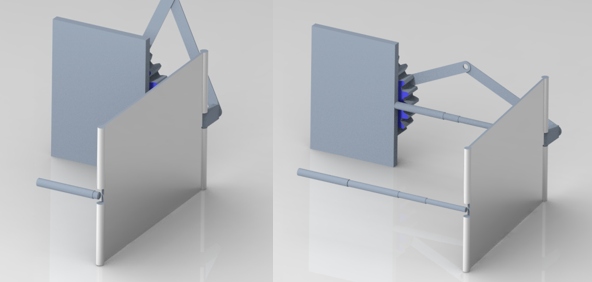
图4.曲柄伸缩杆机构示意图
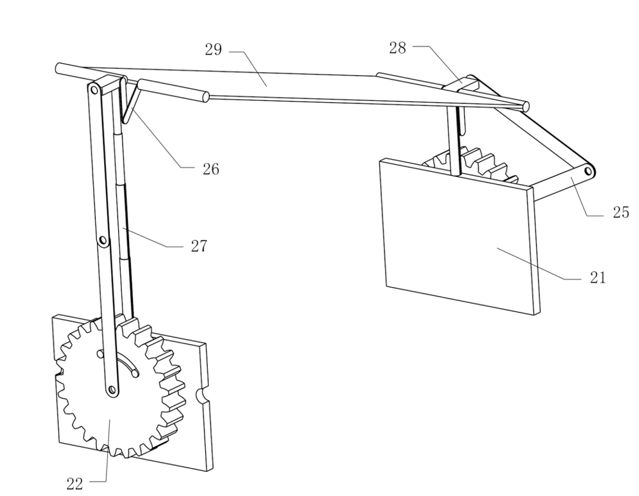
图5.曲柄伸缩杆机构示意图
大曲柄起始端与非标准齿轮相连,伸缩杆起始端与齿轮旁固定的墙板相连,曲柄——伸缩杆机构的终端与一连接块相连,如图5所标28所示,连接块随曲柄的运动而运动,伸缩杆随连接块的移动而伸长。
2.3联动机构
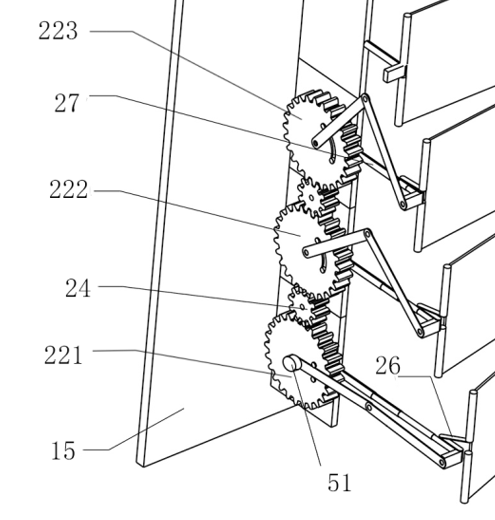
图6.联动机构示意图
当“机电一体化智能窗”工作时,如图5和图6所示,置于非标准齿轮221轴处的电机运转,带动非标准齿轮221转动。大曲柄的一端与齿轮轴处是销连接的关系,同时大曲柄的一支会穿过非标准齿轮的限位装置,非标准齿轮221的转动会导致齿轮上的限位装置与大曲柄接触并对其施加曲柄向前伸展的动力。与此同时,非标准齿轮221的转动会带动外窗小齿轮24的传动,外窗小齿轮的转动会带动非标准齿轮222的转动,非标准齿轮222的转动会带动其上外窗小齿轮的转动,该外窗小齿轮的转动会进一步带动非标准齿轮223的转动,从而实现五个齿轮同步转动。与非标准齿轮221带动大曲柄运动的原理相同,非标准齿轮222和非标准齿轮223同样会带动大曲柄的向外伸展运动,但由于限位等级不同,齿轮221的限位装置最先与大曲柄接触,然后齿轮222的限位装置、齿轮223的限位装置再依次与大曲柄接触,从而实现齿轮221所连曲柄伸展程度最大,齿轮222所连大曲柄伸展程度其次,齿轮223所连大曲柄伸展程度最小的结果。
大曲柄向外伸展首先带动连接块向外运动,从而带动伸缩杆向外延伸,曲柄——伸缩杆机构起到了提供动力和支撑的作用。和上文所述限位程度不同的原理相同,非标准齿轮221所连接的曲柄——伸缩杆及其所带动的连接块向外移动的距离最远,与非标准齿轮222相连的相同结构移动距离次之,与标准齿轮223相连的相同结构移动距离最小。
2.4翻转机构

图7.外窗翻转图
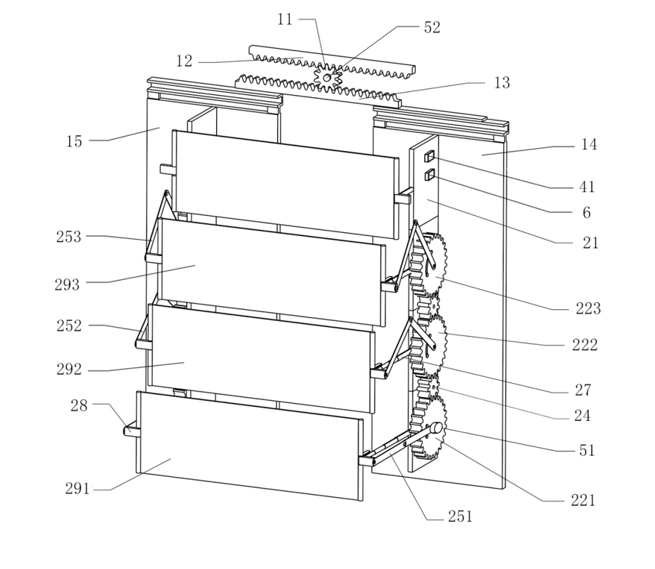
图8.外窗平动图
如图8所示,当外窗玻璃29左右两侧的两组齿轮运动同步时,外窗玻璃可实现平移运动,此时与齿轮221所连外窗玻璃平动距离最远,与齿轮222所连外窗玻璃平动距离次之,与齿轮223所连外窗玻璃平动距离最近。多块外窗玻璃的不同平动距离可将自然光折射到室内距窗户更远的地方。
如图7所示,当外窗玻璃29左右两侧的两组齿轮运动不同步时,外窗玻璃会由于左右两侧平动距离不同而产生倾斜,左右两侧平动距离之差不同时外窗玻璃的倾斜角度也不同。根据“直角三角形斜边大于直角边”可判断当不加其他结构时外窗玻璃会由于长度不够而无法实现倾斜,因此要增加小曲柄26结构,此处小曲柄起调节位置的作用。当多块玻璃实现不同角度倾斜时,自然光可照进室内更大面积的空间,达到增加采光的目的。
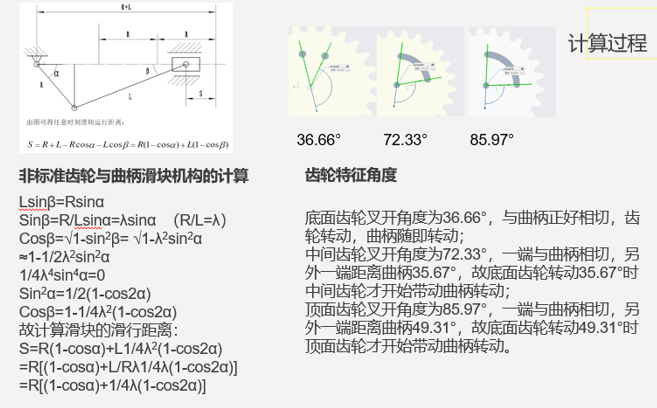
图9,翻转角度计算过程
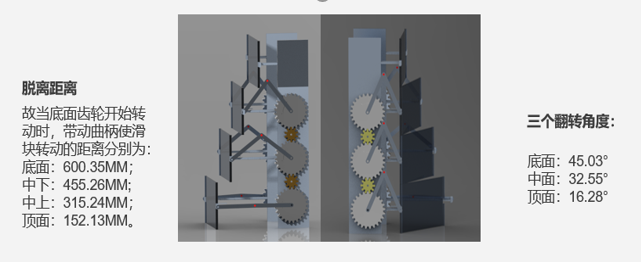
图10.计算结果展示
如图3和图9图10所示,根据齿轮开槽弧长不同可实现四个平动距离和三个翻转角度。
2.5齿轮双齿条结构

图11.内窗齿轮双齿条结构配合图
利用一个齿轮啮合两个齿条同时控制两片窗板的开合,可以节省控制的电机数量,达到同步控制的效果,且控制齿轮的舵机连接单片机,可以根据风速大小调节窗板开合程度,实现智能控制。
3.电控设计
流程图:
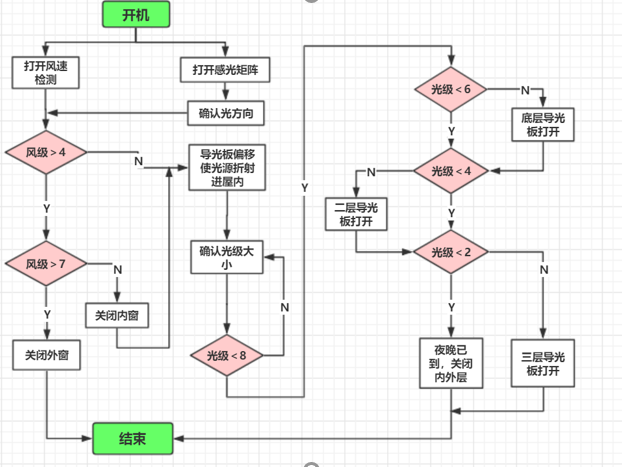

图12.电控元件
将多个光学传感器放置于所述外窗顶部的不同位置,从而能够从多个角度接收光照并且比较强度,将结果交给所述控制单元等待反馈,进而实现全天日照的追踪。所述电机型号均为MG99R,风速传感器使用三叶片涡轮式构造,所述叶片能够最大程度的被风力带动,从而将底部的磁铁产生旋转,所述磁铁的旋转进一步产生感应电流,经过芯片的分析后被RS485线路传输至控制中枢,实现灵敏度高,安全可靠的要求。
所述的STM32F4内置程序,使用双变量拟合进行程序的判断,通过对所述光学传感器与所述风速传感器所产生的的双信号进行分析,从而实现在复杂情况下的对于外窗玻璃控制。
4.仿真设计
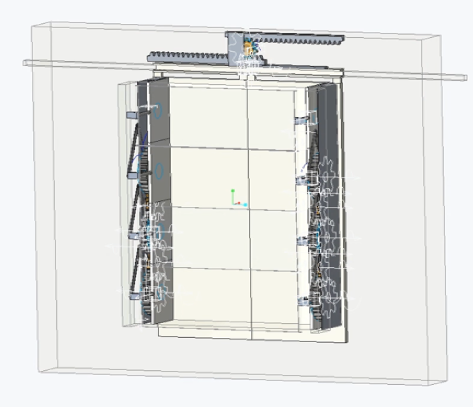
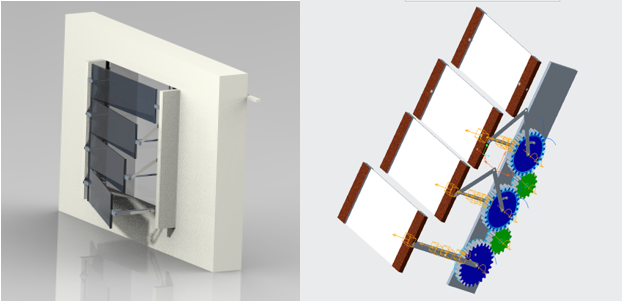
图13.仿真动画截图
本设计“机电一体化智能窗”采用creo三维建模和运动仿真实现对整体设计的宏观感知和把控,了解此设计的运动轨迹和工作状态。