五、经费预算:
本项目基于MATLAB图像处理技术和偏振原理,无线传输技术和电机远程控制技术,设计和开发一个由无人机搭载摄像机和电机控制系统的高层玻璃幕墙裂纹检测系统。
通过半自动控制无人机,在最大程度上减弱甚至消除图像的主要高光区,再对裂纹进行识别。系统的总体结构图如图2.1所示:本系统由上位机模块,无人机,电机偏振模块,传输模块构成。无人机起飞成功后,进入预设路径,控制相机拍摄照片传回上位机,经过初次裂纹检测筛选出疑似含有裂纹的图片,再经过远程控制电机,驱动齿轮旋转,使偏振镜偏转三个不同的角度,拍摄三组图片,通过传输模块将图片传回上位机,利用MATLAB对图片进行处理,再通过控制电机,使偏振镜旋转到一个最优角度,从而获得高光较少的图片信息。最后对图像进行一系列处理,对裂纹进行加深识别,从而获得裂纹信息。
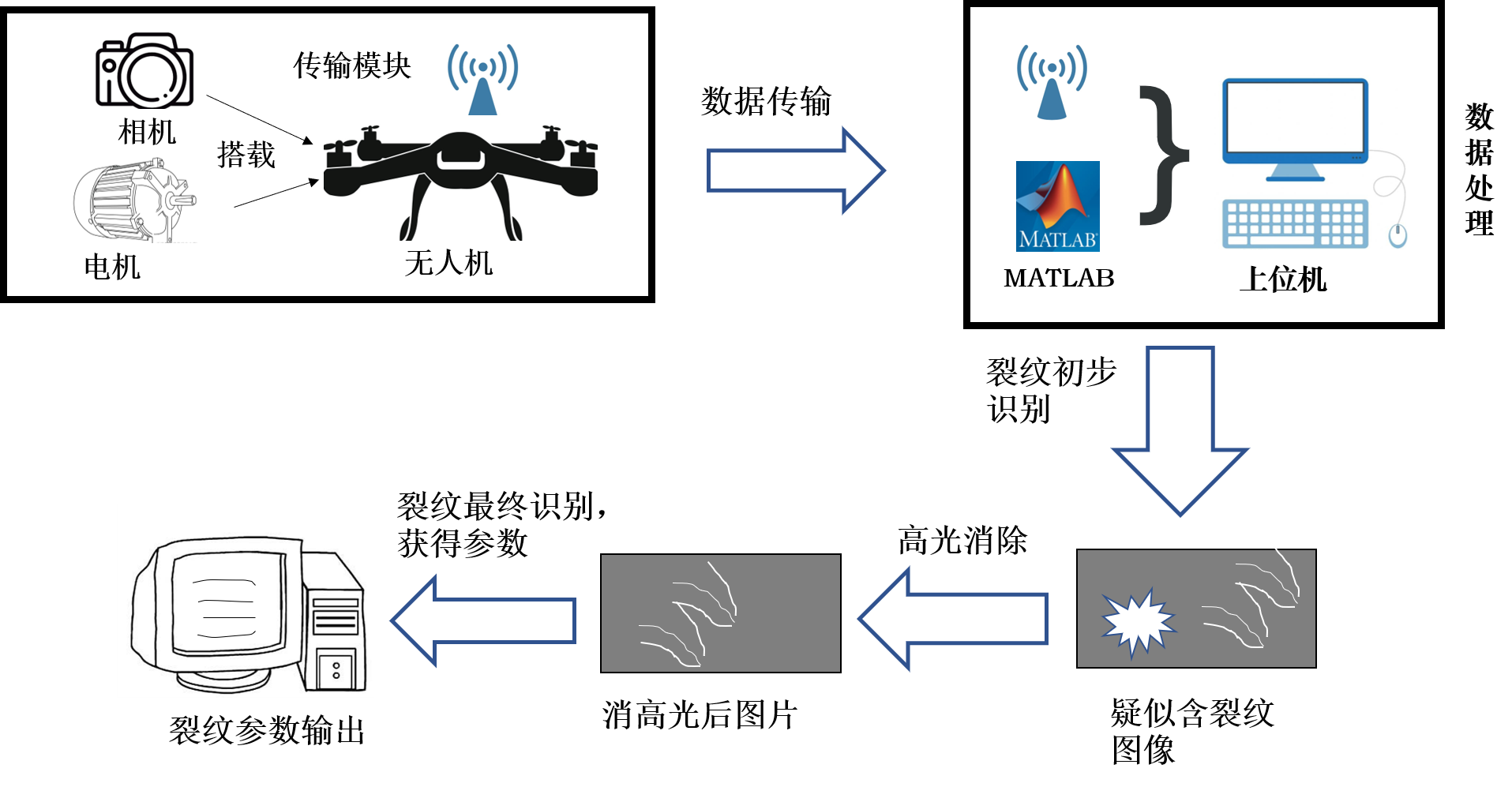
图2.1 系统结构图