二、项目方案:
主持(参与)的主要科研项目有:9WLED照明灯管驱动电源设计、电力系统电能质量广域在线检测方法研究、电工电子学类课程体系的创新改革与实践、三电平VIENNA整流器设计、三相三电平PWM整流器关键技术研究等。
四、预期成果:
近年来,中国电力行业迅速发展,行业规模大幅增长,与此同时电力设备也在急剧增加,为保障供电可靠性,许多抢修和检修工作是在带电环境下进行的,,这意味着施工现场也随设备的增加而逐年增多。为保障非施工人员的安全也同时为了给施工人员一个相对安静的环境,在施工区域一般在准备阶段就部署了安全栏。电力安全围栏的围网大体上分软质和硬质两种,硬质围栏大多由木条或环氧树脂做成制作成栅栏状,可以拉开但受结构设计影响合起来时仍占用空间。软质围网大多由丙纶高强丝或聚酯纤维做成,一般成渔网状收纳后占用体积小易于存放。虽然软质围栏便于携带,安全系数高并且不易磨损,但是这种围网在收纳时十分不便,非常容易松散,导致在每次使用前,需要先花费大量的时间去整理该围网后再去使用。本项目准备研究一个基于MSP430单片机来控制电机运动,以及通过采集和处理电机电流等数据来判断收纳的具体状况来进行自动收纳软质围网的自动收纳器,来解决该安全围栏的收纳问题。
五、经费预算:
本装置采用MSP430单片机作为系统核心控制,通过电机模块L298N连接单片机实现对直流电机的实际控制,基于单片机对脉冲信号的强大处理能力,设计了电机测速系统。比较当下电机测速的方法,设计了一种以单片机MSP430为核心控制,以霍尔传感器作为检测元件,测量直流电机的转速,并通过OLED液晶显示器显示的方法。单片机本身带有ADC转换功能,因此电路中不需要设计AD转换电路,从而简化了电路设计。
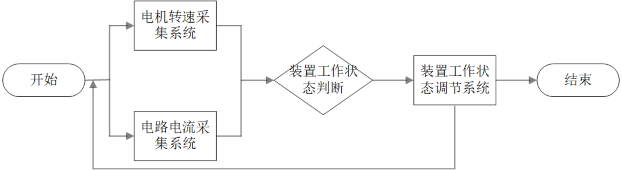
图(一)系统结构示意图
霍尔传感器工作原理及感应电路:
霍尔转速传感器安装在测速轮外侧间隔 1~3mm,磁场由安装在测速轮上的磁片提供,当磁片块经过霍尔传感器正前方时,磁通密度发生改变,霍尔元件便会产生脉冲信号,通过运放的整形,触发单片机外部中断,由单片机完成计算得到相应的转速,通过OLED屏显示速度的变化。
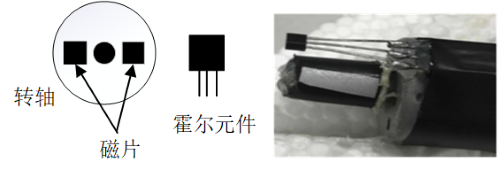
图(二)霍尔传感器结构及放置图
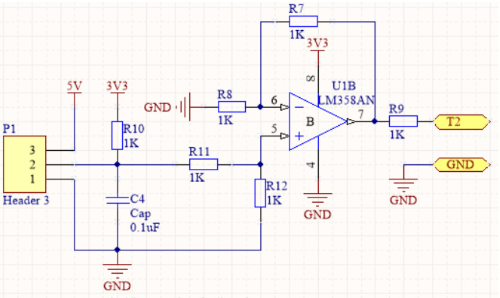
图(三)霍尔感应采样电路
双路AD采样:
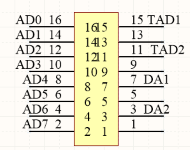
图(四)AD及TAD接口图
原理:
ADC采样参考电压 2.5V 对应的数字量为 212-1=4095,则1.2V 时对应的 ADC 采集数字量有 1.2/2.5=x/4095,可计算出1.2V时对应采集数据量x=1095。将两个采样口分别接在采样电阻两侧,两侧压差即采样电阻两端的电压,根据欧姆定律即可转化为电流。
PID算法及误差分析算法:
系统以MSP430单片机为控制核心,由定时器模拟产生PWM( 脉冲宽度调制) 来实现对直流电机的速度调节。目标转速值由矩阵键盘输入后,通过MSP430F149内部的增量式 PID 算法来调节 PWM的占空比,实现对电机速度的调节,最终达到目标转速值并保持不变。同时液晶显示屏能够实时显示当前实际转速值、目标转速值。增量式PID算法表达式:
△u(k)=u(k)-u(k-1)=K1e(k)-K2e(k-1)+K3e(k-2)
式中:K1=KP+KI+KD;K2=KP+2KD;K3=KD。增量式PID算法不需要对偏差进行累加,只要确定了系数K1 ,K2,,K3和前3次偏差采样值,就可确定控制增量。增量式PID算法只需算出控制增量,计算误差小,对控制量的影响较小,因此比较适合直流电机调速系统。

图(五) 增量式PID调速框图
软件程序设计:
本系统转速检测采用中断子程序进行周期测量,中断一次测出一个周期,对电机连续中断n次测n个周期进行求和并平均,周期T = ,消除随机误差,提高测量精度。霍耳感应方式获得电机转动信号脉冲,脉冲频率与转速成正比,通过单片机测量其脉冲周期实现测速。
,消除随机误差,提高测量精度。霍耳感应方式获得电机转动信号脉冲,脉冲频率与转速成正比,通过单片机测量其脉冲周期实现测速。
整个装置的软件系统主要包括: 电机启停主程序、数据处理子程序、电路自动断电子程序、PID算法转速调整子程序,显示子程序。
硬件电路设计:
a. 单片机系统。本设计采用MSP430F149单片机。
b. 电源模块。电源经过整流滤波和稳压分别给单片机系统、电阻采样电路及霍尔感应电路供电。
c. 串联电阻采样电路。采集电阻两端的模拟电压并转换,获取电路电流值。
d. 霍尔采样电路。霍尔元件安放位置及与信号处理电路。
e. 电机模块。装置收取围网部分的组装,主要硬件有直流电机、绞盘及绞绳。

图(六)系统工作示意图